–Ы–µ—В–Њ–Љ 2016 –≥–Њ–і–∞ –Ї –љ–∞–Љ –Њ–±—А–∞—В–Є–ї—Б—П –≥–ї–∞–≤–∞ –Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—М–љ–Њ–≥–Њ –њ—А–Њ–µ–Ї—В–∞ ¬Ђ–У–µ–Ї–Ї–Њ–љ¬ї –Р–ї–µ–Ї—Б–∞–љ–і—А –Ь–∞—В–≤–µ–µ–≤. –Т —З–Є—Б–ї–µ –њ—А–Њ—З–µ–≥–Њ –µ–≥–Њ –Ј–∞–і–∞—З–∞ —Г—З–Є—В—М —И–Ї–Њ–ї—М–љ–Є–Ї–Њ–≤ –і–µ–ї–∞—В—М ¬Ђ—А–Њ–±–Њ—В–Њ–≤¬ї вАФ –Љ–∞—И–Є–љ–Ї–Є, —Б–∞–Љ–Њ–ї–µ—В—Л вАФ –Є–Ј–љ–∞—З–∞–ї—М–љ–Њ –љ–∞ –Њ—Б–љ–Њ–≤–µ Arduino. –Я—А–Њ–±–ї–µ–Љ–∞ –њ—А–Њ–µ–Ї—В–∞ –±—Л–ї–∞ –≤ —В–Њ–Љ, —З—В–Њ Arduino —Н—В–Њ –њ—А–Њ—Б—В–Њ –њ–ї–∞—В–∞ –±–µ–Ј –њ–µ—А–Є—Д–µ—А–Є–Є, –∞ –і–ї—П —Б–Њ–Ј–і–∞–љ–Є—П ¬Ђ—А–Њ–±–Њ—В–∞¬ї –љ—Г–ґ–љ–Њ –Ї —Н—В–Њ–є –њ–ї–∞—В–µ –њ–Њ–і–Ї–ї—О—З–∞—В—М –і–∞—В—З–Є–Ї–Є, —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і—Л (–Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–µ –њ—А–Є–≤–Њ–і—Л, —Г–њ—А–∞–≤–ї—П—О—Й–Є–µ –њ–∞—А–∞–Љ–µ—В—А–∞–Љ–Є –і–≤–Є–ґ–µ–љ–Є—П), –∞ –≥–ї–∞–≤–љ–Њ–µ, –Љ–Њ—Й–љ—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є. –≠—В–Њ –Љ–Њ–ґ–љ–Њ —Б–і–µ–ї–∞—В—М —И—В–∞—В–љ—Л–Љ–Є —Б—А–µ–і—Б—В–≤–∞–Љ–Є Arduino –њ—А–Є –њ–Њ–Љ–Њ—Й–Є —В–∞–Ї –љ–∞–Ј—Л–≤–∞–µ–Љ—Л—Е —И–Є–ї–і–Њ–≤ (—Б–Њ–≤–Љ–µ—Б—В–Є–Љ—Л—Е —Б Arduino –њ–ї–∞—В —А–∞—Б—И–Є—А–µ–љ–Є—П). –Э–Њ, –≤–Њ-–њ–µ—А–≤—Л—Е, –µ—Б—В—М –њ—А–Њ–±–ї–µ–Љ–∞ —Б –њ–Њ–і–Ї–ї—О—З–µ–љ–Є–µ–Љ –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е —И–Є–ї–і–Њ–≤ –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ, –≤–Њ-–≤—В–Њ—А—Л—Е, –Љ—Л –Њ—З–µ–љ—М –±—Л—Б—В—А–Њ –њ–Њ–ї—Г—З–∞–µ–Љ –Ј–і–Њ—А–Њ–≤–µ–љ–љ—Л–є –Ї–Є—А–њ–Є—З, –Є–Ј –Ї–Њ—В–Њ—А–Њ–≥–Њ –≤–Њ –≤—Б–µ —Б—В–Њ—А–Њ–љ—Л —В–Њ—А—З–∞—В –њ—А–Њ–≤–Њ–і–∞, —З—В–Њ –Ї—А—Г–њ–љ–Њ–≥–∞–±–∞—А–Є—В–љ–Њ, –љ–µ–Ї—А–∞—Б–Є–≤–Њ –Є –љ–µ–љ–∞–і–µ–ґ–љ–Њ. –Ъ —В–Њ–Љ—Г –ґ–µ –і–∞–ї–µ–Ї–Њ –љ–µ –≤—Б–µ–≥–і–∞ —Г–і–∞–µ—В—Б—П —А–µ–∞–ї–Є–Ј–Њ–≤–∞—В—М —И—В–∞—В–љ—Л–Љ–Є —Б—А–µ–і—Б—В–≤–∞–Љ–Є –≤–µ—Б—М –љ–∞–±–Њ—А —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї–∞, –Ї–Њ—В–Њ—А—Л–є —В—А–µ–±—Г–µ—В—Б—П.
–†–µ—И–µ–љ–Є–µ –Њ—З–µ–≤–Є–і–љ–Њ: —Б–і–µ–ї–∞—В—М —Б–≤–Њ—О –њ–ї–∞—В—Г, –Ї–Њ—В–Њ—А–∞—П, –њ–Њ —Б—Г—В–Є, –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В –Є–Ј —Б–µ–±—П Arduino —Б –Є–љ—В–µ–≥—А–Є—А–Њ–≤–∞–љ–љ—Л–Љ–Є —И–Є–ї–і–∞–Љ–Є. –Ч–∞–і–∞—З–∞ –Њ–Ї–∞–Ј–∞–ї–∞—Б—М –љ–µ–њ—А–Њ—Б—В–Њ–є, –Є –њ–Њ—Б–ї–µ –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е –њ–Њ–њ—Л—В–Њ–Ї —А–µ–±—П—В–∞ –Њ–±—А–∞—В–Є–ї–Є—Б—М –Ї –љ–∞–Љ. –Ґ–∞–Ї –њ–Њ—П–≤–Є–ї–∞—Б—М –њ–ї–∞—В–∞, –Ї–Њ—В–Њ—А—Г—О –Љ—Л –љ–∞–Ј–≤–∞–ї–Є Robomega (–Ј–∞–Ї–∞–Ј—З–Є–Ї–Є –Є—Б–њ–Њ–ї—М–Ј—Г—О—В –љ–∞–Ј–≤–∞–љ–Є–µ Livetronic Mega)
–°–µ—А–і—Ж–µ–Љ Robomega —Б—В–∞–ї –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А ATmega128 —Б–Њ —Б—В–∞ ¬Ђ–љ–Њ–≥–∞–Љ–Є¬ї. –Э–∞ –њ–ї–∞—В–µ —А–∞—Б–њ–∞—П–љ—Л:
- USB-UART –њ–µ—А–µ—Е–Њ–і–љ–Є–Ї, —З–µ—А–µ–Ј –Ї–Њ—В–Њ—А—Л–є –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –њ—А–Њ—И–Є–≤–Ї–∞ –њ–ї–∞—В—Л –Є –µ–µ –Њ—В–ї–∞–і–Ї–∞;
- 12 —Ж–Є—Д—А–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤ (—А–∞–Ј—К–µ–Љ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –µ—Б—В—М –њ–Є—В–∞–љ–Є–µ, –Ј–µ–Љ–ї—П –Є —Ж–Є—Д—А–Њ–≤–∞—П ¬Ђ–љ–Њ–≥–∞¬ї ATmega);
- 8 –∞–љ–∞–ї–Њ–≥–Є—З–љ–Њ —Б–і–µ–ї–∞–љ–љ—Л—Е –∞–љ–∞–ї–Њ–≥–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤;
- bluetooth –Љ–Њ–і—Г–ї—М;
- –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤ –њ–Є—В–∞–љ–Є—П, –Њ–і–Є–љ –Є–Ј –љ–Є—Е —Б–Є–ї–Њ–≤–Њ–є –і–ї—П –њ–Є—В–∞–љ–Є—П –Љ–Њ—Й–љ—Л—Е –і–≤–Є–≥–∞—В–µ–ї–µ–є;
- 15-–∞–Љ–њ–µ—А–љ—Л–µ –і—А–∞–є–≤–µ—А—Л –і–≤–Є–≥–∞—В–µ–ї–µ–є –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞, —З—В–Њ –Ј–љ–∞—З–Є—В, —З—В–Њ –Ї –њ–ї–∞—В–µ –Љ–Њ–ґ–љ–Њ –њ–Њ–і–Ї–ї—О—З–∞—В—М –∞–Ї–Ї—Г–Љ—Г–ї—П—В–Њ—А, –∞ –Є–Љ–њ—Г–ї—М—Б–љ—Л–Љ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–Љ –њ–Є—В–∞–љ–Є—П –љ–∞–њ—А—П–ґ–µ–љ–Є–µ –Њ–њ—Г—Б–Ї–∞–µ—В—Б—П –і–Њ –њ—П—В–Є –≤–Њ–ї—М—В, –њ–Њ—Б–ї–µ —З–µ–≥–Њ —В–∞–Ї –Љ–Њ–ґ–љ–Њ –њ–Є—В–∞—В—М –Љ–Њ—В–Њ—А—Л;
- –Ј–∞—Й–Є—В–∞ –Њ—В —Б–ї–Є—И–Ї–Њ–Љ –±–Њ–ї—М—И–Њ–≥–Њ —В–Њ–Ї–∞;
- –Ј–∞—А—П–і–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ;
- –Љ–љ–Њ–ґ–µ—Б—В–≤–Њ —Б—А–µ–і—Б—В–≤ –Є–љ–і–Є–Ї–∞—Ж–Є–Є: —Б–≤–µ—В–Њ–і–Є–Њ–і—Л, –њ–Њ–і–Ї–ї—О—З–µ–љ–љ—Л–µ –Ї –њ–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ–Љ—Г –њ–Њ—А—В—Г, –Ї –љ–Њ–ґ–Ї–∞–Љ –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞, —Б–≤–µ—В–Њ–і–Є–Њ–і—Л, –Є–љ–і–Є—Ж–Є—А—Г—О—Й–Є–µ –Ј–∞—А—П–і–Ї—Г, –Ј–∞–≤–µ—А—И–µ–љ–Є–µ –Ј–∞—А—П–і–Ї–Є, –љ–∞–ї–Є—З–Є–µ –≤–љ–µ—И–љ–µ–≥–Њ –Є—Б—В–Њ—З–љ–Є–Ї–∞ –њ–Є—В–∞–љ–Є—П –Є —В.–і.

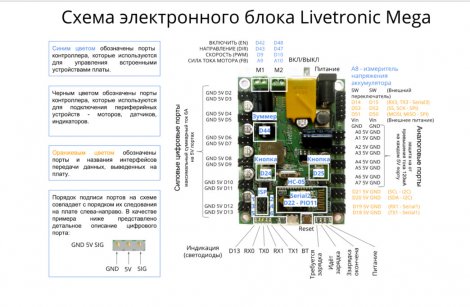
–§–Њ—В–Њ–≥—А–∞—Д–Є–Є —Б —Б–∞–є—В–∞ –њ—А–Њ–µ–Ї—В–∞ Livetronic
–Я–ї–∞—В–∞ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –њ–Є—В–∞–љ–Є—П –Њ—В –і–≤—Г—Е Li-Ion –∞–Ї–Ї—Г–Љ—Г–ї—П—В–Њ—А–Њ–≤ —Б—Г–Љ–Љ–∞—А–љ—Л–Љ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ–Љ 8,4 –≤–Њ–ї—М—В–∞. –Э–∞ –љ–µ–є –Є–љ—В–µ–≥—А–Є—А–Њ–≤–∞–љ–Њ –Ј–∞—А—П–і–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –і–ї—П —В–∞–Ї–Њ–≥–Њ –∞–Ї–Ї—Г–Љ—Г–ї—П—В–Њ—А–∞, –њ—А–Є—З–µ–Љ –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –Љ–Њ–ґ–µ—В –њ–Њ–ї—Г—З–Є—В—М –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ —Б—В–µ–њ–µ–љ–Є, —Б—В–∞–і–Є–Є –Ј–∞—А—П–і–Ї–Є –Є —В–∞–Ї –і–∞–ї–µ–µ. –Ф–ї—П –њ–Є—В–∞–љ–Є—П –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ –Є –∞–љ–∞–ї–Њ–≥–Њ–≤—Л—Е –і–∞—В—З–Є–Ї–Њ–≤ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –Њ—В–і–µ–ї—М–љ—Л–є –ї–Є–љ–µ–є–љ—Л–є –±–ї–Њ–Ї –њ–Є—В–∞–љ–Є—П. –Ф–ї—П –њ–Є—В–∞–љ–Є—П —Ж–Є—Д—А–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤, —В–Њ –µ—Б—В—М —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–Њ–≤, –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤—Л–і–µ–ї–µ–љ–љ—Л–є –Є–Љ–њ—Г–ї—М—Б–љ—Л–є –Є—Б—В–Њ—З–љ–Є–Ї. –Ґ–∞–Ї–Њ–µ –Њ–±–Є–ї–Є–µ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤ –њ–Є—В–∞–љ–Є—П –Њ–±—Г—Б–ї–Њ–≤–ї–µ–љ–Њ —В–µ–Љ, —З—В–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Є—В–∞—В—М —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і—Л (—В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–µ –Ј–∞–і–∞–љ–Є–µ —В—А–µ–±–Њ–≤–∞–ї–Њ —З–µ—В—Л—А–µ –Љ–Њ—Й–љ—Л—Е —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞ —Б –њ–Њ—В—А–µ–±–ї–µ–љ–Є–µ–Љ 1,5 –Р –Ї–∞–ґ–і—Л–є, —З—В–Њ –њ—А–Є–≤–Њ–і–Є—В –љ–∞—Б –Ї —Б—Г–Љ–Љ–∞—А–љ–Њ–Љ—Г —В–Њ–Ї—Г –≤ 6–Р). 6–Р –±–Њ–ї—М—И–Њ–є —В–Њ–Ї, –њ–Њ—Н—В–Њ–Љ—Г –љ—Г–ґ–љ–Њ –±—Л–ї–Њ —Б–і–µ–ї–∞—В—М –≤—Л–і–µ–ї–µ–љ–љ—Л–є –Є—Б—В–Њ—З–љ–Є–Ї –њ–Є—В–∞–љ–Є—П. –≠—В–Є–Љ –ґ–µ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–Љ –њ–Є—В–∞–љ–Є—П –љ–µ —Б—В–Њ–Є—В –њ–Є—В–∞—В—М –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –Є –∞–љ–∞–ї–Њ–≥–Њ–≤—Л–µ –і–∞—В—З–Є–Ї–Є, –њ–Њ—В–Њ–Љ—Г —З—В–Њ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і—Л —Б–Њ–Ј–і–∞—О—В –Љ–∞—Б—Б—Г —И—Г–Љ–∞.
–Ч–∞—Й–Є—В–∞ –Њ—В —Б–ї–Є—И–Ї–Њ–Љ –±–Њ–ї—М—И–Њ–≥–Њ —В–Њ–Ї–∞ –і–ї—П —Ж–Є—Д—А–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤ —Б—А–∞–±–∞—В—Л–≤–∞–µ—В –љ–∞ 6,5 –Р, –і–ї—П –∞–љ–∞–ї–Њ–≥–Њ–≤—Л—Е вАФ –љ–∞ 120 –Љ–Р. Bluetooth-–Љ–Њ–і—Г–ї—М –њ–Є—В–∞–µ—В—Б—П –Њ—В –≤—Л–і–µ–ї–µ–љ–љ–Њ–≥–Њ –Є—Б—В–Њ—З–љ–Є–Ї–∞ –њ–Є—В–∞–љ–Є—П –љ–∞ 3,3 –Т. –°–Њ—Б—В–Њ—П–љ–Є–µ –Ј–∞—А—П–і–∞ –Є –њ–Є—В–∞–љ–Є—П –Њ—В–Љ–µ—З–∞–µ—В—Б—П –Љ–љ–Њ–ґ–µ—Б—В–≤–Њ–Љ –Є–љ–і–Є—Ж–Є—А—Г—О—Й–Є—Е —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–≤.
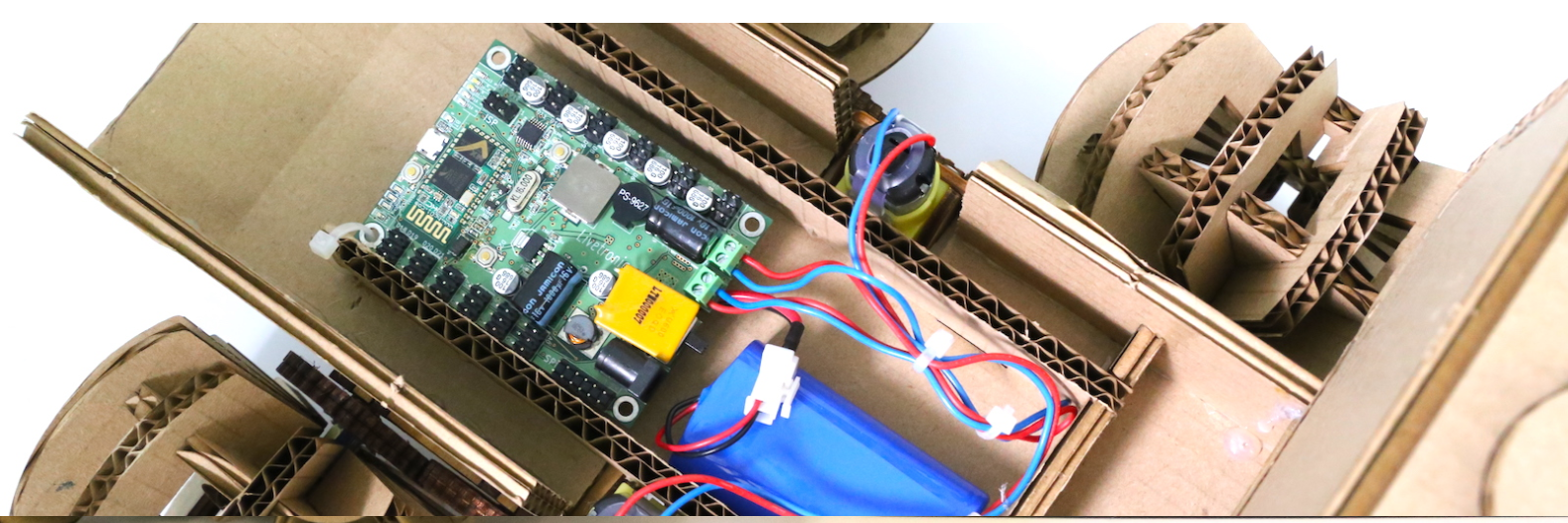
–Э–∞ –Њ—Б–љ–Њ–≤–µ —Н—В–Њ–є –њ–ї–∞—В—Л –±—Л–ї–Є —Б–і–µ–ї–∞–љ—Л –Ї–∞–Ї –Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—М–љ—Л–µ, —В–∞–Ї –Є –Ї–Њ–Љ–Љ–µ—А—З–µ—Б–Ї–Є–µ –њ—А–Њ–µ–Ї—В—Л. –Т–Њ—В, –љ–∞–њ—А–Є–Љ–µ—А, –Њ–њ–Є—Б–∞–љ–Є–µ –Њ–і–љ–Њ–≥–Њ –Є–Ј –Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—М–љ—Л—Е –њ—А–Њ–µ–Ї—В–Њ–≤: –љ–∞–±–Њ—А–∞ LiveTronic Mega Inventor, –Ї–Њ—В–Њ—А—Л–є –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Б—В—А–Њ–Є—В—М –і–Њ–≤–Њ–ї—М–љ–Њ —Б–ї–Њ–ґ–љ—Л—Е —А–Њ–±–Њ—В–Њ–≤ –Є–Ј –Ї–∞—А—В–Њ–љ–∞, —Д–∞–љ–µ—А—Л, –њ–ї–∞—Б—В–Є–Ї–∞. –Э–∞–±–Њ—А –њ–Њ–і—Е–Њ–і–Є—В –Ї–∞–Ї –і–ї—П –і–Њ–Љ–∞—И–љ–µ–≥–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П, —В–∞–Ї –Є –і–ї—П –Ї—А—Г–ґ–Ї–Њ–≤ —А–Њ–±–Њ—В–Њ—В–µ—Е–љ–Є–Ї–Є. –Ч–і–µ—Б—М –Љ–Њ–ґ–љ–Њ –Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б –Њ–≥—А–Њ–Љ–љ—Л–Љ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ–Љ ¬Ђ—А–Њ–±–Њ—В–Њ–≤¬ї, —Б–Њ–Ј–і–∞–љ–љ—Л—Е –љ–∞ –µ–≥–Њ –Њ—Б–љ–Њ–≤–µ.



–Я—А–Є–Љ–µ—А –Ї–Њ–Љ–Љ–µ—А—З–µ—Б–Ї–Њ–≥–Њ –њ—А–Њ–µ–Ї—В–∞ вАФ –Љ–∞—И–Є–љ–Ї–∞ –і–ї—П –Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є—П –≤–Њ–Ј–і—Г—Е–Њ–≤–Њ–і–Њ–≤ —Б–Є—Б—В–µ–Љ –≤–µ–љ—В–Є–ї—П—Ж–Є–Є. –Я–Њ —Б—Г—В–Є —Н—В–Њ ¬Ђ—А–Њ–±–Њ—В¬ї –≤ –≤–Є–і–µ –Љ–∞—И–Є–љ–Ї–Є —Б –≤–Є–і–µ–Њ–Ї–∞–Љ–µ—А–Њ–є, –Ї–Њ—В–Њ—А—Л–Љ –Љ–Њ–ґ–љ–Њ —Г–і–∞–ї–µ–љ–љ–Њ —Г–њ—А–∞–≤–ї—П—В—М –Є —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—В—М –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є.
–Я–ї–∞—В–∞ –њ–Њ–ї—Г—З–Є–ї–∞—Б—М —Б–ї–Њ–ґ–љ–∞—П, –±–Њ–ї—М—И–∞—П (–њ–Њ –љ–∞—И–Є–Љ –Љ–µ—А–Ї–∞–Љ: –Њ–љ–∞ —А–∞–Ј–Љ–µ—А–Њ–Љ –њ—А–Є–Љ–µ—А–љ–Њ —Б –њ–∞—З–Ї—Г —Б–Є–≥–∞—А–µ—В), —З–µ—В—Л—А–µ—Е—Б–ї–Њ–є–љ–∞—П. –Ю–љ–∞ —А–µ–≥—Г–ї—П—А–љ–Њ –і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г–µ—В—Б—П –љ–∞ –њ—А–Њ—Д–Є–ї—М–љ—Л—Е –≤—Л—Б—В–∞–≤–Ї–∞—Е –Є –Є–Љ–µ–µ—В –±–Њ–ї—М—И–Њ–є —Г—Б–њ–µ—Е –Ј–∞ —Б—З–µ—В —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є —И–Є—А–Њ–Ї–Њ–≥–Њ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї–∞. –Ю–і–љ–∞–Ї–Њ –≤—Б–ї–µ–і—Б—В–≤–Є–µ —Н—В–Њ–≥–Њ –µ–µ —Ж–µ–љ–∞ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –≤—Л—Б–Њ–Ї–∞.
–Ґ–∞–Ї–ґ–µ –љ–∞–±–Њ—А—Л —Б –њ–ї–∞—В–Њ–є Robomega —З–∞—Б—В–Њ –і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г—О—В—Б—П –љ–∞ —Д–µ—Б—В–Є–≤–∞–ї—П—Е –Є –Є–Љ–µ—О—В –Њ–≥—А–Њ–Љ–љ—Л–є —Г—Б–њ–µ—Е —Г –і–µ—В–µ–є —А–∞–Ј–ї–Є—З–љ–Њ–≥–Њ –≤–Њ–Ј—А–∞—Б—В–∞.




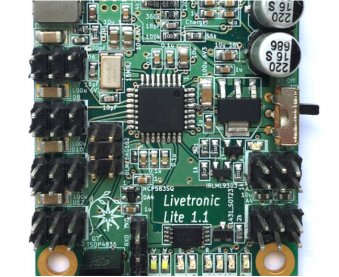
Robomega –њ–Њ–і—Е–Њ–і–Є—В –љ–µ –і–ї—П –≤—Б–µ—Е –њ—А–Њ–µ–Ї—В–Њ–≤: –≤—Л—Б–Њ–Ї–∞—П —Ж–µ–љ–∞, –±–Њ–ї—М—И–Є–µ –≥–∞–±–∞—А–Є—В—Л, –љ–µ –≤—Б–µ–≥–і–∞ –≤–Њ—Б—В—А–µ–±–Њ–≤–∞–љ –≤–µ—Б—М –±–Њ–≥–∞—В—Л–є —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї. –С—Л–ї–Њ —А–µ—И–µ–љ–Њ —Б–і–µ–ї–∞—В—М –≤—В–Њ—А—Г—О –њ–ї–∞—В—Г –њ–Њ–Љ–µ–љ—М—И–µ –Є –њ–Њ–і–µ—И–µ–≤–ї–µ, –µ–µ –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–ї–Њ—Б—М —Б—В–∞–≤–Є—В—М –љ–∞ ¬Ђ—А–Њ–±–Њ—В—Л¬ї-—Б–∞–Љ–Њ–ї–µ—В—Л (Robomega –≤–µ–ї–Є–Ї–Њ–≤–∞—В–∞ –і–ї—П —В–∞–Ї–Є—Е –Ј–∞–і–∞—З). –Ь—Л —А–∞–Ј—А–∞–±–Њ—В–∞–ї–Є –µ—Й–µ –Њ–і–љ—Г –њ–ї–∞—В—Г, –њ—А–Є–Љ–µ—А–љ–Њ –≤ –і–≤–∞ —А–∞–Ј–∞ –Љ–µ–љ—М—И–µ, –≤ –њ–Њ–ї—В–Њ—А–∞ –і–µ—И–µ–≤–ї–µ –Є —Б —Г—А–µ–Ј–∞–љ–љ—Л–Љ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї–Њ–Љ. –Э–∞ –µ–µ –Њ—Б–љ–Њ–≤–µ —Б–і–µ–ї–∞–љ, –љ–∞–њ—А–Є–Љ–µ—А, –љ–∞–±–Њ—А LiveTronic Micro Inventor, –Ї–Њ—В–Њ—А—Л–є —В–Њ—З–љ–Њ —В–∞–Ї –ґ–µ –Њ–њ–Є—Б–∞–љ –Ј–і–µ—Б—М.


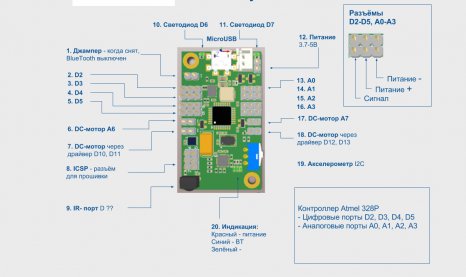
–Я–ї–∞—В–∞ —Б–і–µ–ї–∞–љ–∞ –љ–∞ –Њ—Б–љ–Њ–≤–µ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ ATmega328, –Њ–љ –Њ—Й—Г—В–Є–Љ–Њ –Љ–µ–љ—М—И–µ –њ–Њ —А–∞–Ј–Љ–µ—А—Г –Є –Љ–µ–љ–µ–µ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–є, –љ–Њ –њ–Њ–і–µ—И–µ–≤–ї–µ. –Э–∞ –њ–ї–∞—В–µ –µ—Б—В—М —В–∞–Ї–Њ–є –ґ–µ, –Ї–∞–Ї –љ–∞ Robomega, Bluetooth-–Љ–Њ–і—Г–ї—М, –Ј–∞—А—П–і–Ї–∞, USB-UART –њ–µ—А–µ—Е–Њ–і–љ–Є–Ї –і–ї—П –Њ—В–ї–∞–і–Ї–Є –Є –њ—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞–љ–Є—П, –і—А–∞–є–≤–µ—А –і–≤–Є–≥–∞—В–µ–ї–µ–є –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞, –љ–Њ —В–µ–њ–µ—А—М —Н—В–Њ –Њ–і–љ–∞ –і–≤—Г—Е–Ї–∞–љ–∞–ї—М–љ–∞—П –Љ–Є–Ї—А–Њ—Б—Е–µ–Љ–∞, —А–∞—Б—Б—З–Є—В–∞–љ–љ–∞—П –љ–∞ –Љ–µ–љ—М—И–Є–є —В–Њ–Ї. –Р–љ–∞–ї–Њ–≥–Њ–≤—Л—Е –Є —Ж–Є—Д—А–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤ —В–Њ–ґ–µ —Б—В–∞–ї–Њ –Љ–µ–љ—М—И–µ. –Я–Є—В–∞–љ–Є–µ –∞–љ–∞–ї–Њ–≥–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤ —В–Њ—З–љ–Њ —В–∞–Ї –ґ–µ –Ј–∞—Й–Є—Й–µ–љ–Њ, —Б—В–Њ–Є—В –Є–љ—Д—А–∞–Ї—А–∞—Б–љ—Л–є –њ—А–Є–µ–Љ–љ–Є–Ї –і–ї—П —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є –њ—А–Њ—Б—В—Л—Е –њ—Г–ї—М—В–Њ–≤ –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –Я–Є—В–∞–љ–Є–µ —Ж–Є—Д—А–Њ–≤—Л—Е –≤—Л—Е–Њ–і–Њ–≤ —В–∞–Ї –ґ–µ –Њ—В–і–µ–ї—М–љ–Њ–µ, –љ–Њ —В–Њ–Ї —Г–Љ–µ–љ—М—И–µ–љ —Б 6,5–Р –і–Њ 4,8–Р.
3d –њ–µ—З–∞—В—М klnfc led nfc starwars uart usb wifi –∞–љ—В—Г—А–∞–ґ –∞—А—В–µ—Д–∞–Ї—В –±–µ–Ј –Ї–Њ—А–њ—Г—Б–∞ –±—А–∞—Б–ї–µ—В –≤ –Ї–Њ—А–њ—Г—Б–µ –≤–µ–і—М–Љ–∞–Ї –≤–Ј–ї–Њ–Љ –≤–Є–±—А–Њ –≤–Є–і–µ–Њ –≤–Њ–ї—И–µ–±—Б—В–≤–Њ –≤—А–µ–Љ—П –≤—Б–µ –њ—А–Њ–µ–Ї—В—Л –≥–∞—А—А–Є –њ–Њ—В—В–µ—А –≥—А–Є–±—Л –і–≤–µ—А—М –і–µ—А–µ–≤–Њ –і–µ—В–µ–Ї—В–Њ—А –і–ї—П –і–Њ–Љ–∞ –і–Њ—А–Њ–ґ–Ї–∞ –і—А–µ–≤–∞ –ґ–µ–Ј–ї—Л –ґ–µ—Б—В—Л –Ј–∞–Љ–Њ–Ї –Ј–∞—А—П–ґ–∞–µ—В—Б—П –Ј–≤–µ–Ј–і–љ—Л–µ –≤–Њ–є–љ—Л –Ј–≤—Г–Ї –Ј–љ–∞—З–Ї–Є –Є–≥—А–Њ–Ї—Г –Є–≥—А–Њ—В–µ—Е–љ–Є–Ї–∞ –Є–Ї –Ї–∞–Ї –≤ —Б–µ—В—В–Є–љ–≥–µ –Ї–∞–Љ–љ–Є –Ї–Є–љ–ґ–∞–ї –Ї–Є—В–∞–є—Ж—Л –Ї–Њ–і –Ї–Њ–ї–±—Л –Ї–Њ—Б–њ–ї–µ–є –Ї—А–Є—Б—В–∞–ї–ї—Л –ї–∞–Ј–µ—А –ї–∞–є—В—Б–∞–±–µ—А –ї—О—Б—В—А–∞ –Љ–∞—Б—В–µ—А—Г –Љ–µ–і–∞–ї—М–Њ–љ –Љ–µ—Е–∞–љ–Є–Ї–∞ –Љ—Г–Ј—Л–Ї–∞–ї—М–љ—Л–є –і–≤–Є–ґ–Њ–Ї –љ–∞ –±–∞—В–∞—А–µ–є–Ї–∞—Е –љ–Њ—Б–Є–Љ–Њ–µ –Њ–±–Ј–Њ—А –Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є–µ –Њ—Б–≤–µ—Й–µ–љ–Є–µ –Њ—В –∞–Ї–Ї—Г–Љ—Г–ї—П—В–Њ—А–∞ –Њ—В —Б–µ—В–Є –Њ—В–Ј—Л–≤—Л –Њ—В–ї–∞–і–Ї–∞ –њ–µ—А—З–∞—В–Ї–∞ –њ–Є–ї—О–ї–Є –њ–Њ—А—В—А–µ—В –њ—А–Њ–≤–Њ–і–љ–∞—П —Б–≤—П–Ј—М –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ–Њ–µ –њ—Г–ї—М—В —А–∞–і–Є–∞—Ж–Є—П —А–∞–і–Є–Њ —А–µ—З—М —А–µ—И–µ–љ–Є—П —А–Њ–±–Њ—В—Л —Б–≤–µ—В —Б–≤–µ—В–ї—П—З–Њ–Ї —Б–≤–µ—В–Њ–і–Є–Њ–і—Л —Б—В–∞–љ–Њ–Ї —Б—В–∞—В—М–Є —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ–Њ–µ —Б—В–Є–Љ–њ–∞–љ–Ї —В–µ–ї–µ—Д–Њ–љ —В–µ—А–Љ–Є–љ–∞–ї —В–Њ–ї–Ї–Є–љ —Г–і–Њ–±–љ—Л–µ –њ—А–Є–±–Њ—А—Л —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є–≥—А–Њ–Ї–∞ —Д–∞–љ—В–∞—Б—В–Є–Ї–∞ —Д–ї–µ–є—В–∞ —Д–Њ–ї–ї–∞—Г—В –і–µ–≤–∞–є—Б —Ж–≤–µ—В—Л —З–∞—Б—Л —З—Г—П—В—М –і—А—Г–≥ –і—А—Г–≥–∞ —Н–Ї—А–∞–љ