Colindo («носитель» на квэнья) — самосборный станок для автоматической расстановки SMD компонентов на плату перед пайкой.
Работа над Сolindo началась осенью 2016 года. Количество заказанных плат постепенно увеличивалось, ручная сборка начала становиться затруднительной. Заказывать на заводе? Но заводская сборка приобретает смысл при масштабе в сотни плат, что для наших задач все еще редкость. Поэтому решили начать полуавтоматическую сборку в домашних условиях — обзавестись станком, который сможет автоматически расставлять электронные компоненты.
Конечно, первым делом мы изучили готовые решения. На тот момент в Китае не нашлось станка, который удовлетворил бы нас по характеристикам, габаритам и цене. Но оказалось, что есть в мире целое сообщество людей, которое строит такие расстановщики. На сайте проекта openpnp.org представлена написанная на Java программа для управления подобными станками, а также примеры самосборных машин. Некоторые из них продаются, но это тоже не очень интересно. Было решено сделать свой станок.

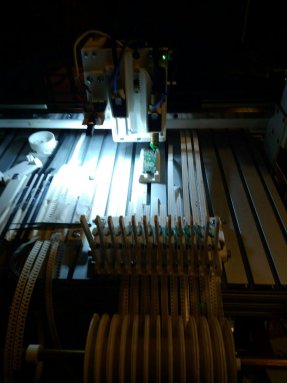
Станок с несколькими держателями плат
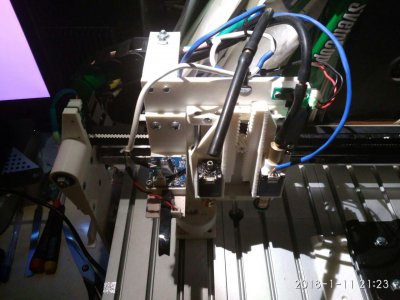
«Голова» станка
В середине рабочей поверхности закрепляется печатная плата. Посадочные места компонентов имеют свои координаты (а, точнее, смещение относительно угла платы). Среда разработки, в которой мы проектируем платы — Kicad — умеет выгружать списки этих смещений в файл, а OpenPnP умеет этот файл подгружать. Таким образом создается задание для сборки. Также в управляющую программу станка заносятся списки координат фидеров (так называется устройство для подачи) с компонентами. После включения станок определяет координаты текущего положения «головы», после чего рассчитывает нужные смещения, а дальше собирает компоненты по списку. Например, увидев в списке конденсатор на 1 мкФ и зная координаты смещения для фидера с такими конденсаторами, станок ведет «голову» с вакуумной присоской по заданным координатам, захватывает компонент и переносит на плату с заданным смещением относительно угла платы).
Для сборки станка оказались нужны: двигатели, управляющая плата, система управления движущейся «головой» (две ременных передачи по оси x и y), вакуумная система захвата, фидеры для компонент, питание, а также корпус, в котором это все размещено, и соединительные конструкции для сборки. А еще камера верхнего обзора для наведения на плату и некоторые компоненты (в планах добавить нижнюю камеру).

Часть деталей закуплена здесь, в Москве: алюминиевые части корпуса, блок питания, подшипники, винтики... Большую часть соединительных конструкций, уголки, стойку портала, основу «головы» расстановщика Крэйл спроектировал под нужды конкретного станка и напечатал на 3D-принтере. Ремни, часть двигателей, присоски, которые берут компоненты, верхнюю и нижнюю камеры заказали на Aliexpress.
Управляющую плату тоже купили на Aliexpress. Это в три раза более дешевый китайский клон американской платы Smoothieboard для 3D-принтера, которая на самом деле универсальная и управляет любым станком со сходными задачами.
Клапаны, которые включают и выключают вакуум, тоже с Aliexpress, а создает вакуум компрессор для аквариумов, в котором клапаны перевернули, и он стал не дуть, а вытягивать.
Для «хоуминга» — возвращения «головы» станка в исходную точку — Крэйл спроектировал платы оптических датчиков. Существуют такие готовые платы, но у них низкая точность и отсутствует триггер Шмитта, что снижает точность итогового позиционирования до недопустимой. Есть покупные датчики с встроенным триггером Шмитта, но они стоят несообразно больших денег (800 р за датчик, которых нужно не меньше трех), так что Крэйл сделал свою собственную плату датчика.
Для того, чтобы брать и вращать компоненты, используется шаговый двигатель с полой осью, через которую подается вакуум в присоску. Изначально предполагалось, что расстановщик берет компоненты из лент, разложенных на поверхности станка. На практике выяснилось, что из-за вибрации при захвате компоненты из лент выпрыгивают. Пришлось сделать набор фидеров, которые подают компоненты по одному. Конструкция фидеров взята также из OpenPnp проекта, доработана для удобства и напечатана на 3D-принтере.

Компоненты в лентах
Компоненты в фидерах
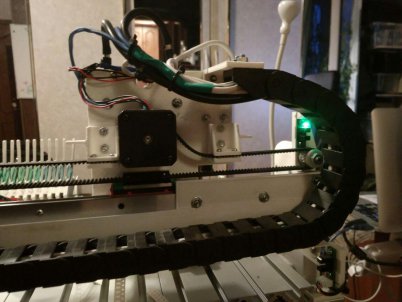
В нижней части корпуса станка расположен блок питания, управляющая плата, четверка клапанов, помпа для создания вакуума, мотор и кинематика для управления по оси y и USB-хаб к которому подключена управляющая плата.
Станок может работать под управлением любой операционной системы, в настоящее время используется Ubuntu Linux. В управляющую программу встроена система распознавания изображений с камеры, которая распознает не все, но для ряда задач помогает.
Основной плюс станка: скорость сборки возросла почти примерно в пять раз, станок собирает плату для лайтсабера, например, за 10 минут, таким образом собрать 5 плат за вечер теперь вовсе не проблема.
Основной минус: точность установки компонентов невысока и составляет 0.5 мм, поэтому после сборки приходится смотреть на плату под микроскопом и поправлять, но все равно это гораздо быстрее, чем сборка руками.
Colindo собрал первую плату в начале декабря 2017 года, за месяц собрано полсотни плат (можно было бы и больше, но не было потребности).

Пример собираемой платы

Микросхемы расставлены вручную
Проектировка и сборка: Крэйл.
Помощь с настройкой и технические консультации: Илья Тагунов.
Автор статьи: Нотиэль.
3d печать klnfc led nfc starwars uart usb wifi антураж артефакт без корпуса браслет в корпусе ведьмак взлом вибро видео волшебство время все проекты гарри поттер грибы дверь дерево детектор для дома дорожка древа жезлы жесты замок заряжается звездные войны звук значки игроку игротехника ик как в сеттинге камни кинжал китайцы код колбы косплей кристаллы лазер лайтсабер люстра мастеру медальон механика музыкальный движок на батарейках носимое обзор образование освещение от аккумулятора от сети отзывы отладка перчатка пилюли портрет проводная связь промышленное пульт радиация радио речь решения роботы свет светлячок светодиоды станок статьи стационарное стимпанк телефон терминал толкин удобные приборы универсальное устройства игрока фантастика флейта фоллаут девайс цветы часы чуять друг друга экран